时间:2025-01-30 来源:FPGA_UCY 关于我们 0
一、设计要求
该系统是模拟汽车安全防碰撞系统,通过该系统,能够很好的为汽车安全保驾护航。
1、系统包含毫米波雷达测距功能;
2、系统包含毫米波雷达测速功能;
3、系统包含速度距离显示模块;
4、系统包含摄像头采集显示功能;
二、设计方案
1、使用FPGA和毫米波雷达模块,FPGA驱动毫米波雷达模块,采集数据进行处理,然后进行显示;摄像头采集图像信息,实时显示在显示器上。
三、设计及调试
1、模块介绍
FPGA 使用正点原子新起点系列的开发板,不要问我为什么是正点原子,因为哥手头只有正点原子的开发板。实物图如下:
毫米波雷达模块某宝上面直接搜的,型号:XW-HLR26,按照自己的技术指标要求,实物图如下:

嗯!不错就是这个小模块,功能很强大奥,主要是便宜,终身售后服务奥!希望厂家别倒闭才好!
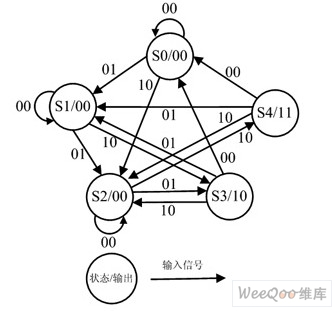
2、设计思路
通过阅读雷达模块是技术手册文档,了解到该模块是使用uart协议进行驱动的,怎么样?听到串口是不是感觉这个设计难度就降低了一大截。哈哈,我们继续来看他的技术手册关键的信息:
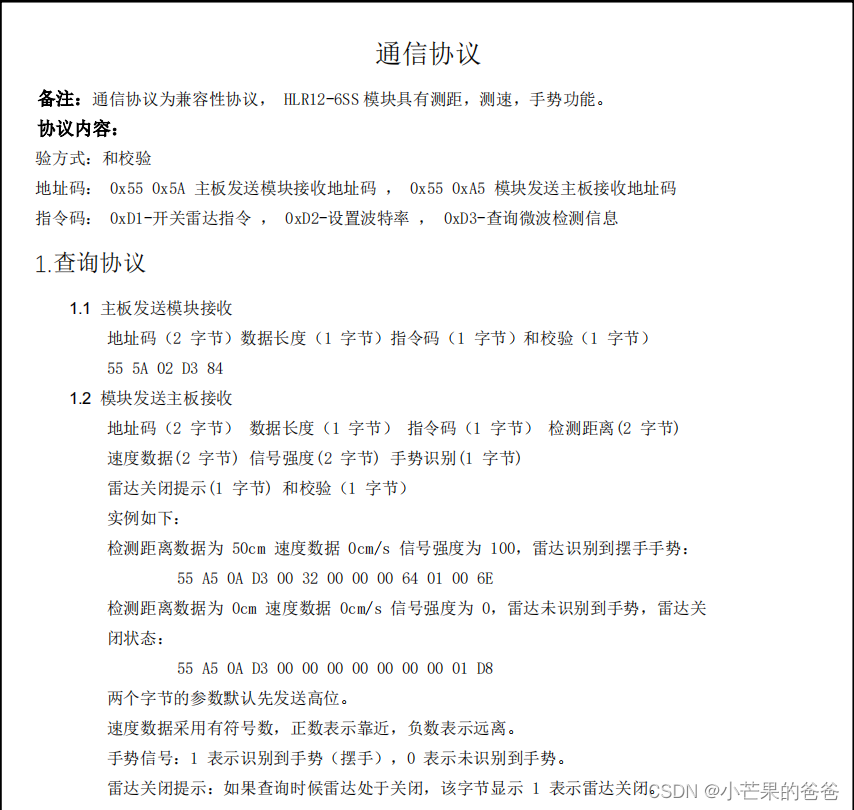
上图只是一部分手册内容,通过手册发现,我们只要按照固定的波特率和固定的指令,通过UART 给模块发送指令,模块就能够按照固定的数据包格式将有用的信息反馈回来。然后我们直接格局手册中的数据信息位来获取有用的距离和速度信息就可以。
首先,FPGA主要负责指令的发送和数据接收以及数据处理;即FPGA通过UART接口,发送查询协议里的指令:55 5A 02 D3 84;这儿需要提醒,模块的默认波特率为,当然可以改的奥。如果我们FPGA程序还没有完成可以使用模块自带的测试软件,进行初步的功能验证。如下:

选择波特率打开串口,电脑直接连接UAB转TTL电平的模块,然后连接雷达模块,四根线:RXD、TXD、GND 、5V。链接好之后就可以通过上面的小软件来观测数据。亲测好用,这儿没有附实际测量的图。
在这儿,我为了确定测试软件是否发送的是查询协议的指令“55 5A 02 D3 84” ,特意将电脑和开发版链接到一起,然后在线抓去测试软件发送的指令,经过观察,发现指令下发一致。到这儿,我们有理由相信,只要FPGA按照固定的波特率将指令“55 5A 02 D3 84”下发,我们就能够得到模块的正确数据。
为了验证我FPGA 程序的正确性,我又通过串口猎人将FPGA的发送的指令进行接收,然后发现,在波特率的基础上,串口猎人接受FPGA的指令正确。这儿没有图片附上。请理解,可能是当时激动了,忘了。
FPGA的指令发送如下,这儿写了一个状态机,单次测量和循环测量,单次测量通过按键控制,多次循环测量100ms发送一次查询指令。
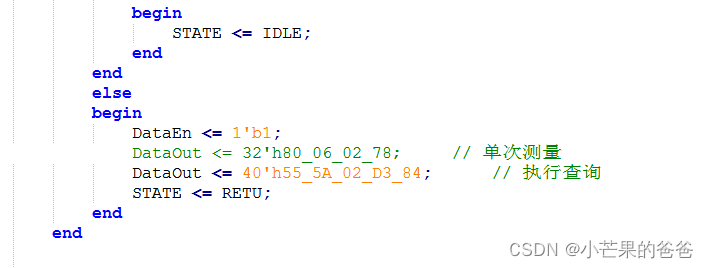
接收数据的位宽为[103:0],根据雷达模块技术手册,我们截取[71: 56]位为距离数据,速度数据同理;
数据接受完成之后,就是显示了,把数据直接捅到数码管模块上就可以了;
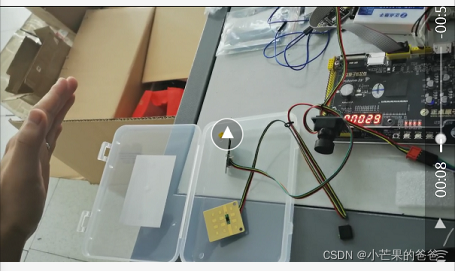
四、系统功能展示
如下图是在录的视频上截图的,记录的功能展示视频可以点击链接进行观看。功能展示视频链接:雷达距离数码管显示-CSDN直播基于FPGA的毫米波雷达安全系统,毫米波雷达测距FPGA数码管显示视频。
雷达自带测试软件展示视频-CSDN直播雷达自带测试软件展示视频
摄像头驱动hdmi显示-CSDN直播摄像头驱动hdmi显示
功能已经测试完毕,工程代码链接:基于FPGA的毫米波雷达测距安全系统-嵌入式文档类资源-CSDN下载FPGA+毫米波雷达模块+摄像头+显示;实现雷达测距、测速、摄像头实时采集周围环境信息,以及实时显更多下载资源、学习资料请访问CSDN下载频道.