时间:2024-07-05 来源:网络搜集 关于我们 0
摘要:主要介绍了FPGA机械臂的设计与开发过程,包括硬件选型、控制系统设计、运动学建模和路径规划等方面。通过实例分析,探讨了FPGA在机械臂控制器中的应用优势,以及如何实现高效、精确的机械臂控制。
工业自动化和机器人技术在各领域得到了广泛应用。机械臂作为机器人技术的重要组成部分,其在生产线、物流、医疗等领域的应用日益广泛。FPGA(现场可编程门阵列)作为一种高度集成的硬件平台,具有实时性、灵活性和高性能等特点,适用于机械臂控制器的设计与开发。本文将探讨如何利用FPGA实现机械臂的高效、精确控制。
硬件选型是FPGA机械臂设计的第一步。在满足性能要求的前提下,选择合适的FPGA器件和外围电路元件。以下为硬件选型要点:
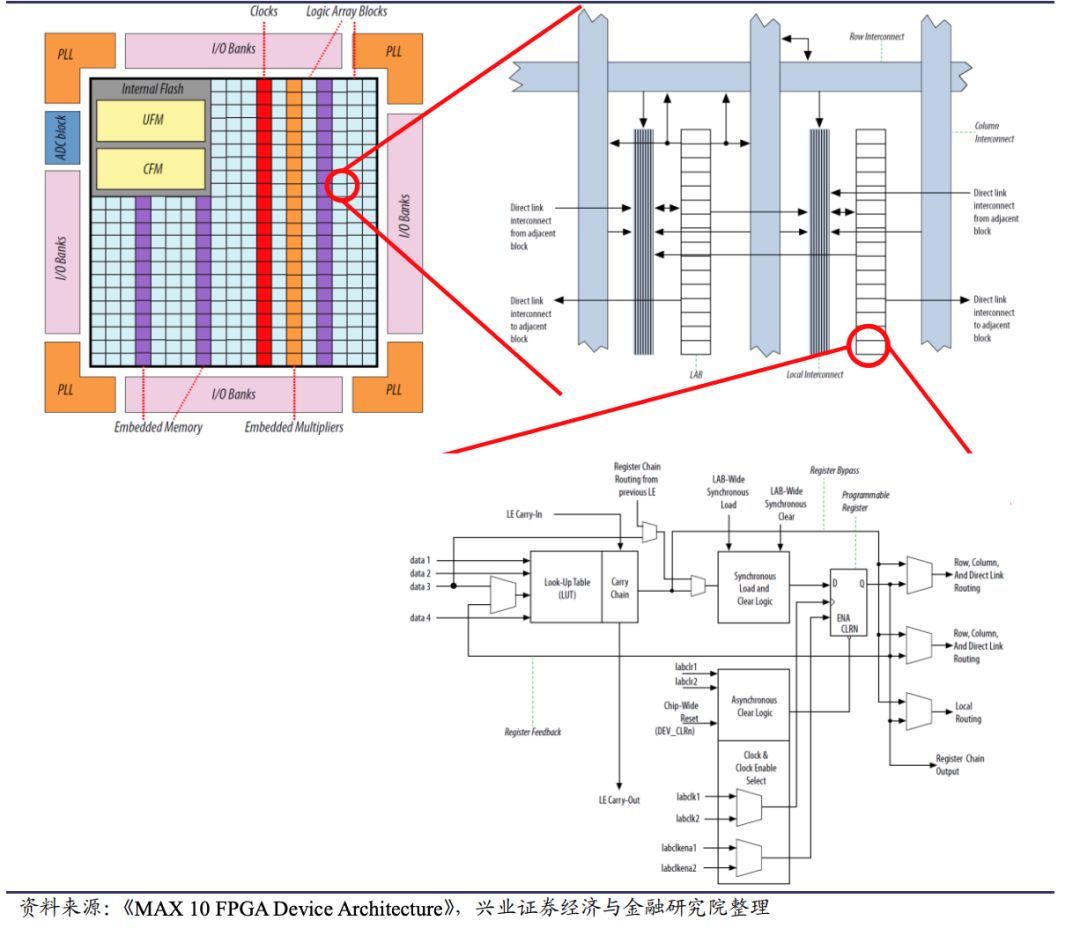
1. FPGA器件选型:根据机械臂的控制需求,选择具有足够资源(如逻辑门、乘法器、RAM等)的FPGA器件。同时,考虑器件的稳定性和功耗,以满足长时间运行的需求。
2. 电源电路:为保证FPGA及其外围元件的正常工作,需要设计稳定、可靠的电源电路。通常采用线性稳压器或开关电源来实现。
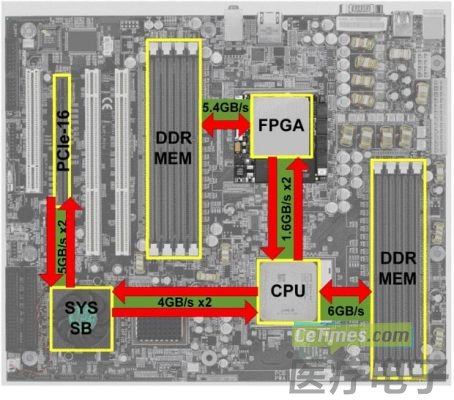
3. 通信接口:机械臂控制系统需要与其他设备(如上位机、传感器等)进行通信。根据实际需求,选择合适的通信接口,如串口、以太网、CAN等。
4. 驱动电路:为实现机械臂的精确控制,需要设计高性能的驱动电路。驱动电路应具有足够的电流和电压承受能力,以驱动机械臂的执行器。

FPGA机械臂的控制系统主要包括以下部分:
1. 运动控制:根据机械臂的运动学模型,编写相应的控制算法,实现机械臂的精确运动。运动控制主要包括位置控制、速度控制和加速度控制等。
2. 姿态控制:对机械臂的姿态进行实时监控和调整,以保证其在执行任务过程中的稳定性和精度。
3. 碰撞检测:为避免机械臂在运动过程中与其他物体或自身发生碰撞,需要开发碰撞检测功能。通过实时检测机械臂的位置和速度,判断是否存在碰撞风险。
4. 故障诊断与保护:对机械臂的各个部件进行实时监测,发现故障及时进行诊断和保护,以保障系统的稳定运行。
1. 运动学建模:根据机械臂的结构和参数,建立其运动学模型。运动学建模有助于分析机械臂的运动性能,为控制算法提供依据。
2. 路径规划:在机械臂执行任务过程中,需要对其运动路径进行规划。路径规划的目标是实现高效、安全的运动。常见的方法包括线性插值、圆弧插值等。
FPGA机械臂设计开发涉及到硬件选型、控制系统设计、运动学建模和路径规划等多个方面。通过充分利用FPGA的实时性和灵活性,可以实现高效、精确的机械臂控制。我们对FPGA机械臂设计开发过程中的关键技术进行了探讨,希望能为相关领域的研究和应用提供参考。
责任编辑: